DBSCAN 이해하기
밀도 기반 클러스터링 방식인 DBSCAN의 알고리즘과 장단점, 구현 방식을 들여다보는 글입니다.
DBSCAN은
오늘의 주제인 DBSCAN(Density-Based Spatial Clustering of Application with Noise)은 무려 96년도 논문(A density-based algorithm for discovering clusters in large spatial databases with noise)에서 제시된 클러스터링 알고리즘입니다.
그대로 번역하면 노이즈가 있는 대규모의 데이터에 적용할 수 있는 밀도 기반의 군집화 알고리즘이란 뜻이죠. 이때 밀도 기반이라는 것은, 클러스터를 찾을 때 데이터 포인트들이 밀도 있게 모여 있는 곳을 찾겠다는 것입니다. 그렇게 하기 위해서 우리는 ‘밀도 있다’라고 보는 거리의 특정 수준을 정합니다. A와 B도 그 수준보다 가까운 거리에 있고, B와 C도 그 수준보다 가까운 거리에 있다면 A, B, C는 우리 기준에서 ‘밀도 있게’ 모여 있다고 볼 수 있겠습니다. A와 C는 가깝지 않아도 그 사이에 연결해주는 B가 있다면 괜찮아요.
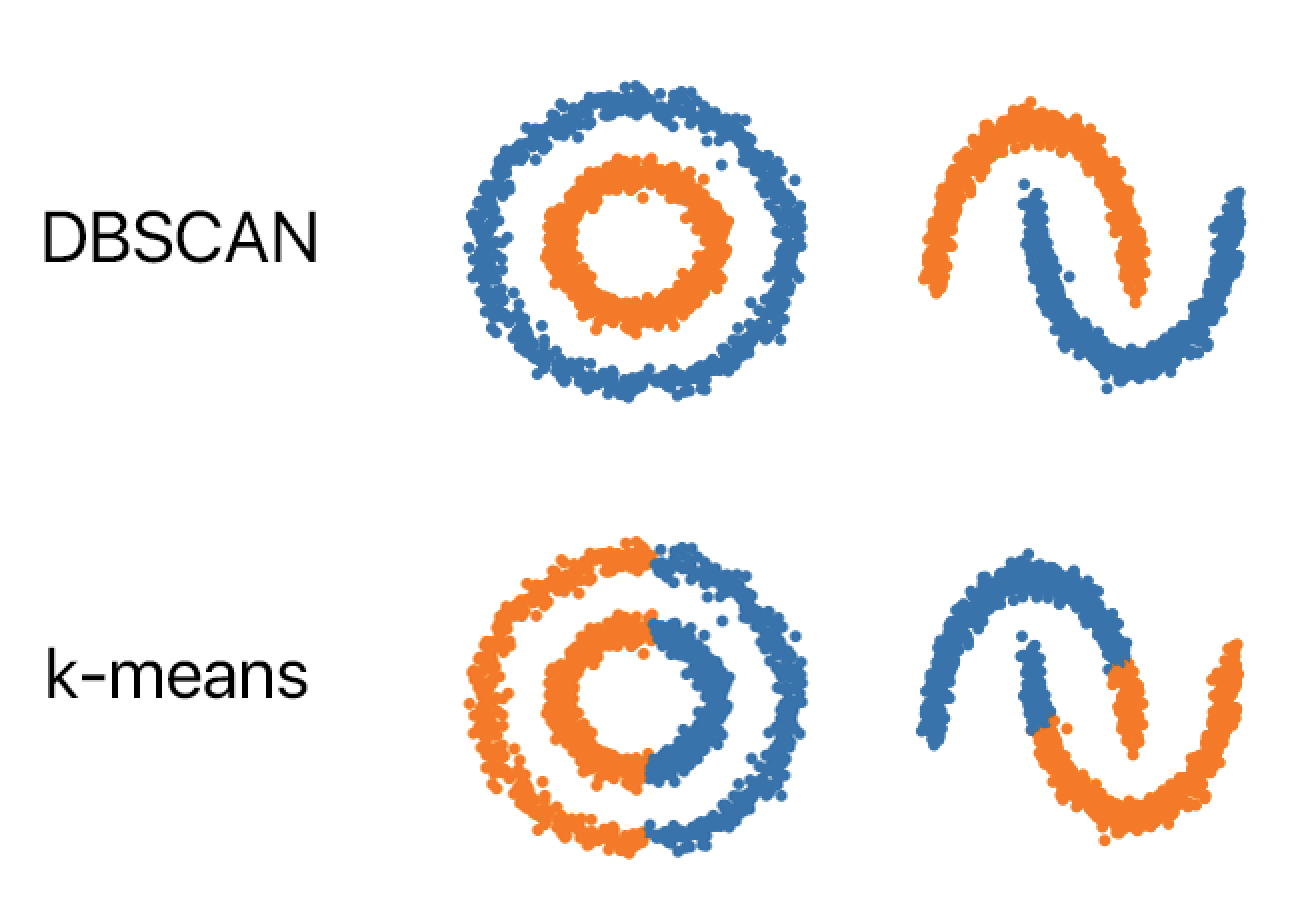 밀도 기반 v.s. 중심과의 거리 기반
밀도 기반 v.s. 중심과의 거리 기반
DBSCAN은 위 그림처럼 단순히 가까운 거리로 묶는 게 아니라 가깝게 모여 있고, 연결되어 있는 데이터들을 묶고 싶을 때 유용합니다.
명백한 DBSCAN의 장점은 클러스터의 개수를 미리 지정할 필요가 없으며 이상치(Noise)를 효과적으로 제외할 수 있다는 것입니다. 우리가 정한 ‘밀도 있다’라는 기준보다 가까운 다른 이웃이 없는 데이터포인트가 있다면, DBSCAN은 이 데이터를 어떤 클러스터에도 넣지 않고 노이즈로 분류합니다.
이런 이유 때문에 저는 사실 회사에서 군집화 목적으로 DBSCAN을 꽤 자주 씁니다. 아니 사실 거의 DBSCAN만 씁니다. 처음 보는 데이터에 대해 군집이 몇 개일지(군집이 존재하기는 하는지) 전혀 알 도리가 없을 뿐더러, 사실상 A라는 집단과 크게 비슷하지도 않은데 ‘그나마’ A의 중심점에 가깝다는 이유로 특정 데이터포인트 x를 A에 배정할 경우(= K-means 같은 걸 쓸 경우) 리스크가 발생하는 업무를 하고 있기 때문입니다. 즉, 제가 찾는 집단과 충분히 가깝지 않은 데이터는 배제할 수 있다는 것이 가장 큰 장점입니다.
 스몰사이즈 군집에 노이즈는 빼고 주세요 감사합니다.
스몰사이즈 군집에 노이즈는 빼고 주세요 감사합니다.
어떻게 하나
작동 방식
DBSCAN 알고리즘은 상당히 간단하며, 미리 정해야 하는 것은 반경의 크기(= eps) 와 최소 군집의 크기(=MinPts) 이 2가지 입니다. 반경의 크기란 아까 언급했던 얼마나 가까워야 연결되었다고 볼 것인지에 대한 거리 값을 말하고, 최소 군집의 크기란 몇 개가 연결되어 있어야 군집으로 볼 것인지 데이터의 개수를 뜻합니다. 즉 MinPts가 10이라면, 6개 데이터가 아무리 오밀조밀 잘 모여있다고 한들 우리가 찾는 군집으로 보지 않고 노이즈로 보겠다는 것입니다.
전체 작동 방식은 다음과 같이 요약됩니다.
- 랜덤하게 데이터포인트를 돌아보자.
- 방문할 때마다 그 포인트에서 다른 모든 데이터포인트까지의 거리를 계산한다.
- 이때 거리 메트릭은 어떤 방법을 사용해도 된다. 거리 메트릭이 하나의 파라미터가 될 수도 있겠다.
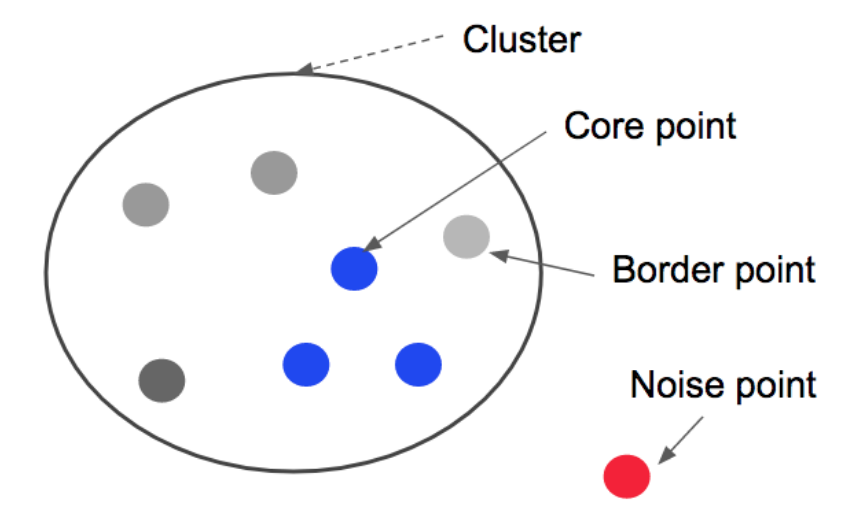
- 내가 정한 반경(eps)보다 작은 다른 데이터포인트가 내가 정한 최소 군집 크기(MinPts ) -1 이상만큼 있다면 이 데이터포인트는 Core Point가 된다. 아니면 노이즈다(하지만 이후에 다른 Core Point에 가까이 있는 Border Point로 확인될 경우 그 클러스터로 들어갈 수도 있다).
- 돌다 보면 하나의 클러스터에 여러 개의 Core Point가 생길 수도 있다. 연결되어 있다면 그냥 같은 클러스터로 분류해주면 된다.
- Border Point는 Core Point 입장에서는 eps보다 가까워서 클러스터로 분류는 되었지만, 자기 입장에서는 eps보다 가까운 데이터가 MinPts보다 적은 데이터를 말한다.
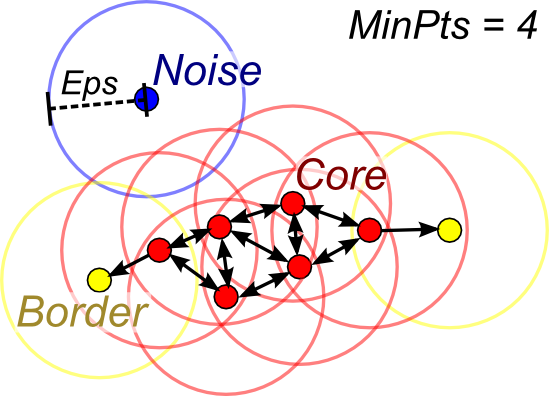 MinPts=4 이면 Core가 되기 위해 반경내에 가까운 3개가 있어야 함
MinPts=4 이면 Core가 되기 위해 반경내에 가까운 3개가 있어야 함
- 어디에도 연결되지 못했거나 몇 개가 연결되어 있어도 최소 군집 크기를 충족하지 못하면 노이즈로 분류한다.
- 모든 데이터포인트가 클러스터이거나 노이즈일 때까지 반복한다.
사람에 따라서는 의사코드를 보는 게 이해가 빠를지도 모르겠습니다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
DBSCAN(DB, distFunc, eps, minPts) {
C := 0 /* Cluster counter */
for each point P in database DB {
if label(P) ≠ undefined then continue /* Previously processed in inner loop */
Neighbors N := RangeQuery(DB, distFunc, P, eps) /* Find neighbors */
if |N| < minPts then { /* Density check */
label(P) := Noise /* Label as Noise */
continue
}
C := C + 1 /* next cluster label */
label(P) := C /* Label initial point */
SeedSet S := N \ {P} /* Neighbors to expand */
for each point Q in S { /* Process every seed point Q */
if label(Q) = Noise then label(Q) := C /* Change Noise to border point */
if label(Q) ≠ undefined then continue /* Previously processed (e.g., border point) */
label(Q) := C /* Label neighbor */
Neighbors N := RangeQuery(DB, distFunc, Q, eps) /* Find neighbors */
if |N| ≥ minPts then { /* Density check (if Q is a core point) */
S := S ∪ N /* Add new neighbors to seed set */
}
}
}
}
이때 RangeQuery 는 모든 데이터포인트에 대해 eps 보다 가까운 이웃을 찾습니다.
1
2
3
4
5
6
7
8
9
RangeQuery(DB, distFunc, Q, eps) {
Neighbors N := empty list
for each point P in database DB { /* Scan all points in the database */
if distFunc(Q, P) ≤ eps then { /* Compute distance and check epsilon */
N := N ∪ {P} /* Add to result */
}
}
return N
}
Scikit-learn 문서 뜯어보기
Python으로 DBSCAN 써보는 가장 간단한 방법은 scikit-learn입니다. 요렇게 쓰면 됩니다(쓰기 전에 데이터 스케일링이 필요합니다).
1
2
3
from sklearn.cluster import DBSCAN
clusters = DBSCAN(eps = 0.3, min_samples = 5).fit_predict(data)
eps와 min_samples (MinPts) 외의 필수는 아니지만 지정할 수 있는 파라미터 중 중요한 것은 다음과 같습니다.
metric: 사용하는 거리 메트릭 (디폴트:euclidean)- euclidean, manhattan, chebyshev, minkowski, wminkowski, seuclidean, mahalanobis 등
sklearn.metrics.pairwise_distance가 허용하는 메트릭 precomputed일 경우 인풋 데이터가 원본 데이터가 아닌 모든 쌍의 거리가 미리 계산된 상태의 거리값이라고 생각하고 알고리즘 적용
- euclidean, manhattan, chebyshev, minkowski, wminkowski, seuclidean, mahalanobis 등
algorithm: 최근접 이웃을 찾는 알고리즘 (디폴트:auto)- brute, kd_tree, ball_tree, auto(3개 중 최적을 선택)
DBSCAN의 fit 메서드를 들여다보면 내부에서 Nearest Neigbors 를 이용한다는 사실을 알 수 있습니다. DBSCAN의 algorithm 파라미터는 사실 이 Nearest Neighbors에 넣을 파라미터입니다.
- brute force : 모든 쌍의 거리를 계산하여 탐색
- KD Tree : 트리 구조를 사용해서 모든 거리를 계산하지 않고 비용을 줄여 탐색
- 기본 아이디어는 만약 A가 B와 굉장히 많이 떨어져 있고, B는 C와 굉장히 가깝다면 A와 C도 멀리 떨어져 있을 것이므로 명백하게 그 거리를 전부 계산할 필요는 없다는 것
- Ball Tree : 마찬가지로 트리 구조 사용, 트리를 만드는 비용은 크지만 고차원의 데이터에서 KD Tree보다 좋은 성능으로 탐색
이웃 탐색 시 삼각부등식( $ x + y \le x + y $ )을 이용해 이웃 후보를 효율적으로 쳐내는 방식 (한번 거리를 계산할 때마다 다른 포인트들의 상한/하한이 딸려오므로)
즉 이 방법을 통해 각 데이터의 근접 이웃의 개수를 셈으로써 Core Point 여부를 결정하는 것이 DBSCAN 알고리즘의 핵심이 되겠습니다.
스파크에서는?
스파크에서 DBSCAN 쓸 때는 pandas udf 내에서 sklearn 호출하는 방식으로 주로 썼는데 데이터 크기에 따라 엄청 느려질 수도 있거든요. 참고로 DBSCAN의 복잡도는 인덱스 구조가 잘 돼 있으면 O($n\log n$)이고 최악의 경우에는 O($\log n^2$)입니다). 그래서 언젠가 스칼라 implementation을 좀 찾아봐야지 생각만 하고 제가 스칼라를 잘 몰라서 그냥 미뤘었는데요. 저 NN 알고리즘처럼 거리 계산을 효율적으로 할 수 있는 구현 + graphframes 사용해서 eps 기준으로 자르고 그래프 만들어서 connected components 쓰면 UDF 안 쓰고 빠르게 할 수 있지 않을까 라는 생각이 들었습니다.
검색해보니, 이분이 그렇게 pyspark로 구현하신 것 같군요. 근데 역시 작은 데이터셋에서는 sklearn보다 느리다고. (큰 데이터를 가져다가) 한번 베껴써봐야겠어요.
An Efficient Implementation of DBSCAN on PySpark
파라미터는 어떻게 정하나
클러스터의 개수를 지정할 필요가 없는 건 장점이지만 DBSCAN도 파라미터 설정이 매우 중요합니다. 만약 반경의 크기를 너무 크게 잡아버리면 모든 데이터포인트가 다 연결되어 버릴 수 있습니다. 너무 작게 하면 다 노이즈가 되어버릴 수도 있고요. 따라서 DBSCAN을 사용할 때는 여러 값의 eps로 실험해보는 과정이 필요합니다. 최소한 일단 저는 그렇게 쓰긴 합니다. 실험을 여러 번 한 다음에 결과물을 보고 제 얄팍한 도메인 지식에 의존하여 이 정도면 납득 가능하게 잘 묶이는군 하고 결정하고 쓰는 편…
 그럴싸해 조와 eps 0.5 너로 정했어
그럴싸해 조와 eps 0.5 너로 정했어
하지만 논문 저자들이 제안한 파라미터 결정을 위한 방법도 있기는 있습니다. 살짝 살펴봅시다.
MinPts 정하기
- 논문 저자들에 따르면 MinPts = 4 와 5는 아래서 소개할 k-dist 플랏 차이가 거의 없고 MinPts를 올리면 계산 비용이 그에 따라서 커지므로 4가 좋겠다.
- rule of thumb로 데이터셋 차원 k를 MinPts로 쓰거나, 2$*$k를 쓰기도 한다.
- 노이즈가 많을수록, 데이터 크기가 클수록 MinPts를 크게 설정하면 좋다.
eps 정하기
원 논문은 eps에 대해서는 Elbow method를 제안합니다. 즉 k-distance 플랏을 그린 다음에 팔꿈치를 찾는 것입니다.
- k-distance 플랏이 뭐냐면
- 일단 k-distance는 정해진 MinPts k개에 대해 각 데이터포인트들마다 k개 가장 가까운 다른 데이터들(k-nearest neighbor)까지의 평균 거리를 말한다.
- 모든 데이터포인트에 대해 k-distance를 구해서 순서대로 정렬하고, y축이 k-distance, x축이 각 데이터포인트가 되도록 그린 플랏을 k-distance 플랏이라고 하겠다.
그리는 법
1 2 3 4 5 6 7 8 9
from sklearn.neighbors import NearestNeighbors from matplotlib import pyplot as plt neighbors = NearestNeighbors(n_neighbors=4) neighbors_fit = neighbors.fit(dataset) distances, indices = neighbors_fit.kneighbors(dataset) distances = np.sort(distances, axis=0) distances = distances[:,1] plt.plot(distances)
- 그리고 그것의 팔꿈치가 뭐냐면
- 이렇게 생긴 거. 💪
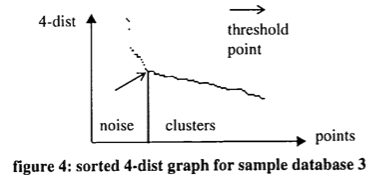
- 즉 이 플랏 상 특정 지점으로 eps를 정하면 그것보다 k-dist가 적은 데이터포인트들은 클러스터로, 그보다 큰 데이터포인트들은 노이즈로 된다고 보면 되는데 그것이 급격하게 꺾여서 완만해지는 지점을 고르자는 것이다.
- 이렇게 생긴 거. 💪
작은 사족
오랜만에 무슨 글을 쓸까 하다가 수요가 있는 글을 써보기 위해 서치 콘솔을 참고했습니다. 서치 콘솔이나 GA는 붙여만 놓고 잘 보지 않게 되는데… 아무튼 이번에 보니 제 블로그에 스펙트럴 클러스터링 이해하기 라는 글을 통해 들어오는 분들이 많더라고요. 스펙트럴 클러스터링은 DBSCAN과 달리 수식이 좀 많이 필요하기 때문에 제가 처음 접했을 때 이게 대체 뭔 소리야 뭘 어떻게 한다는 거야? 라는 마음으로 열심히 공부하고 나서 작성한 글인데요. 그게 유입이 많다니 이참에 다른 클러스터링 기법도 다뤄 보았습니다. DBSCAN은 만만하고 익숙하다고 생각했지만 이렇게 자세히 찾아본 적은 또 없었던 것 같아서 좋았네요. 읽는 분들에게도 도움이 됐으면 좋겠습니다. 🙋♀️